1. Basic Design
1.1. Structure
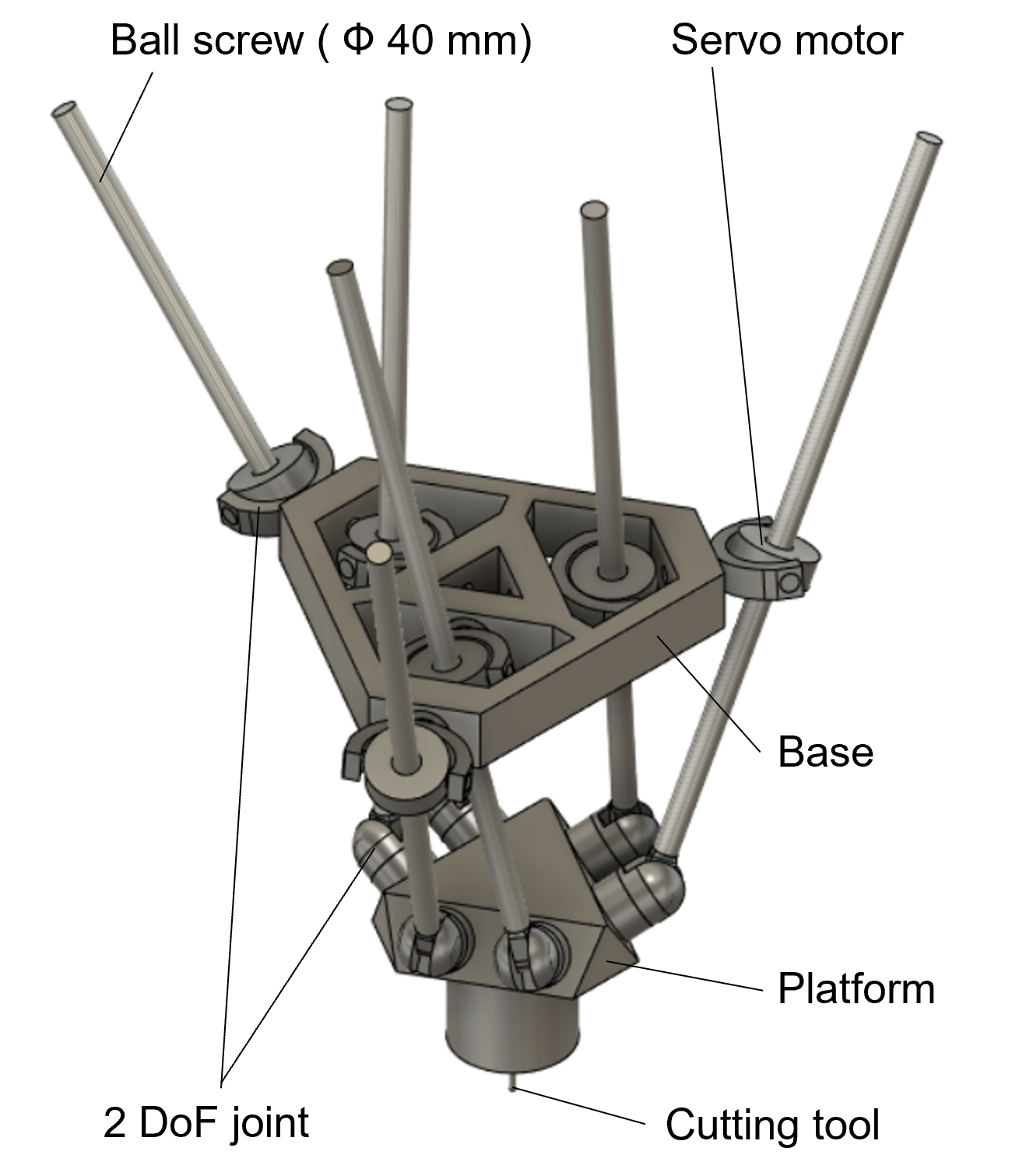
外観
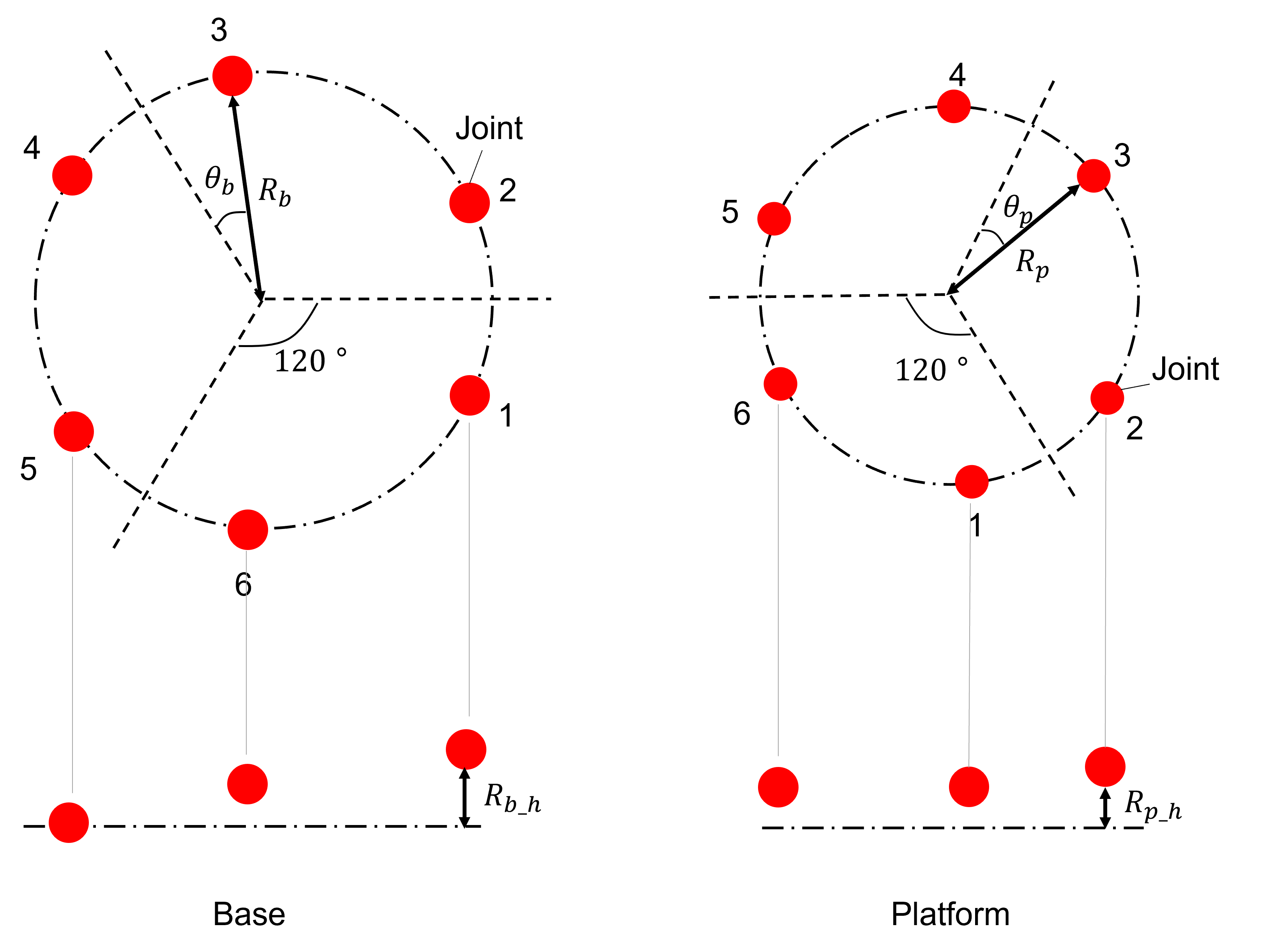
ジョイント配置
1.2. Parameters
Joint ID |
1 |
2 |
3 |
4 |
5 |
6 |
|---|---|---|---|---|---|---|
\(R_{p}, \rm{m}\) |
0.2 |
0.2 |
0.2 |
0.2 |
0.2 |
0.2 |
\(R_{ph}, \rm{m}\) |
0.066 |
0.066 |
0.066 |
0.066 |
0.066 |
0.066 |
\(R_{b}, \rm{m}\) |
0.4 |
0.2 |
0.4 |
0.2 |
0.4 |
0.2 |
\(R_{bh}, \rm{m}\) |
0 |
0 |
0 |
0 |
0 |
0 |
\(l, \rm{m}\) |
1 |
1 |
1 |
1 |
1 |
1 |
\(ml, \rm{kg}\) |
8.985 |
8.985 |
8.985 |
8.985 |
8.985 |
8.985 |
\(\theta_{p}, \rm{°}\) |
10 |
10 |
10 |
10 |
10 |
10 |
\(\theta_{b}, \rm{°}\) |
60 |
60 |
60 |
60 |
60 |
60 |
\(K_{s}, \rm{N/\mu m}\) |
258867 |
258867 |
258867 |
258867 |
258867 |
258867 |
\(K_{n}, \rm{N/\mu m}\) |
638.8 |
638.8 |
638.8 |
638.8 |
638.8 |
638.8 |
\(K_{b}, \rm{N/\mu m}\) |
890 |
890 |
890 |
890 |
890 |
890 |
\(K_{h}, \rm{N/\mu m}\) |
500 |
500 |
500 |
500 |
500 |
500 |
- パラメータの説明
\(R_{p}\): See here
\(R_{ph}\): See here
\(R_{b}\): See here
\(R_{bh}\): See here
\(l\): ボールねじの長さ, \(\rm{m}\)
\(ml\): 各ボールねじの重量, \(\rm{kg}\)
\(\theta_{p}\): See here
\(\theta_{b}\): See here
\(K_{s}\): ねじ軸自体の軸方向剛性, \(\rm{N/\mu m}\)
\(K_{n}\): ナット-ねじ間の軸方向剛性, \(\rm{N/\mu m}\)
\(K_{b}\): ベアリングの軸方向剛性.BaseとPlatform両方の影響を加味., \(\rm{N/\mu m}\)
\(K_{h}\): ボールねじまわりのその他の剛性, \(\rm{N/\mu m}\)
\(K_{bx}, \rm{N/\mu m}\) |
500 |
\(K_{by}, \rm{N/\mu m}\) |
500 |
\(K_{bz}, \rm{N/\mu m}\) |
500 |
\(K_{b\theta_{x}}, \rm{Nm/rad}\) |
1000000000 |
\(K_{b\theta_{y}}, \rm{Nm/rad}\) |
1000000000 |
\(K_{b\theta_{z}}, \rm{Nm/rad}\) |
1000000000 |
\(l_{tcp_g}, \rm{m}\) |
0.259 |
\(I_{platform}, \rm{kgm^2}\) |
\[\begin{split}\begin{pmatrix} 1.018 & 0 & 0 \\ 0 & 1.018 & 0 \\ 0 & 0 & 1.011 \end{pmatrix}\end{split}\]
|
\(I_{base}, \rm{kgm^2}\) |
\[\begin{split}\begin{pmatrix} 8.265 & 0.006 & 0 \\ 0.006 & 8.306 & 0 \\ 0 & 0 & 16.13 \end{pmatrix}\end{split}\]
|
\(I_{leg}, \rm{kgm^2}\) |
\[\begin{split}\begin{pmatrix} 0.75 & 0 & 0 \\ 0 & 0.75 & 0 \\ 0 & 0 & 0.002 \end{pmatrix}\end{split}\]
|
\(mp, \rm{kg}\) |
86.951 |
\(mb, \rm{kg}\) |
265.241 |
\(d_{ballscrew}, \rm{m}\) |
0.04 |
- パラメータの説明
\(K_{bx}\): ベースと移動レール間のX方向剛性, \(\rm{N/\mu m}\)
\(K_{by}\): ベースと移動レール間のY方向剛性, \(\rm{N/\mu m}\)
\(K_{bz}\): ベースと移動レール間のZ方向剛性, \(\rm{N/\mu m}\)
\(K_{b\theta_{x}}\): ベースと移動レール間のXまわりねじり剛性, \(\rm{Nm/rad}\)
\(K_{b\theta_{y}}\): ベースと移動レール間のYまわりねじり剛性, \(\rm{Nm/rad}\)
\(K_{b\theta_{z}}\): ベースと移動レール間のZまわりねじり剛性, \(\rm{Nm/rad}\)
\(l_{tcp g}\): 工具先端とプラットフォーム重心間の距離. CADを用いて取得., \(\rm{m}\)
\(I_{platform}\): プラットフォーム(工具含む)の重心周りの慣性モーメント.CADを用いて取得., \(\rm{kgm^2}\)
\(I_{base}\): ベースの重心周りの慣性モーメント.CADを用いて取得., \(\rm{kgm^2}\)
\(I_{leg}\): ボールねじの重心周りの慣性モーメント.CADを用いて取得., \(\rm{kgm^2}\)
\(mp\): プラットフォームの質量, \(\rm{kg}\)
\(mb\): ベースの質量, \(\rm{kg}\)
\(d_{ballscrew}\): ボールねじの断面直径, \(\rm{m}\)